2020年9月11日,RoboMaster 2020人工智能挑战赛落下帷幕,我所深度强化学习团队组织Neurons战队代表中国科学院大学参赛,包揽导航与运动规划、感知和决策所有三项赛道一等奖。李浩然博士的研究工作《Deep Reinforcement Learning based Automatic Exploration for Navigation in Unknown Environment》荣获最高学术激励奖。
获奖证书
RoboMaster人工智能挑战赛开始于2017年,由国际机器人与自动化会议(ICRA)、电气与电子工程师协会(IEEE)、IEEE机器人与自动化学会(IEEE RAS)、深圳市大疆创新科技有限公司联合主办。由于受到疫情影响,本次RoboMaster大赛改为线上评审方式,组委会设置了导航与运动规划、感知、决策三个赛道,对参赛队伍提交的视频和代码进行评审。
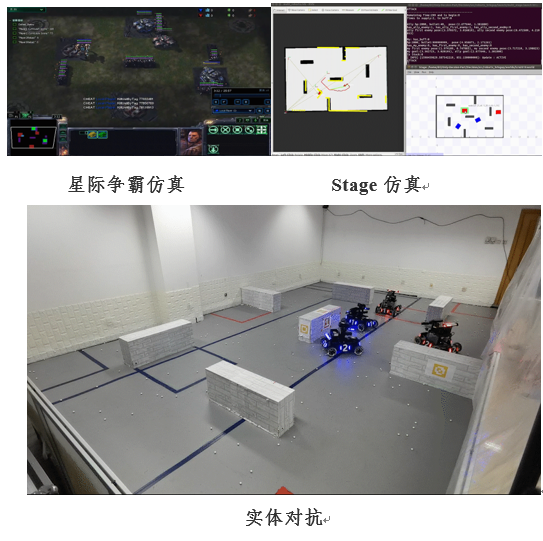
团队的主要优势体现在设计并构建了三维机器人协同对抗仿真平台,有效满足了机器人系统部署和模型效果验证等需求。该平台具有算法验证、模型训练、人机交互和实车迁移等功能,可进行仿真场景下的环境感知、目标检测、多机决策等任务的训练及测试。并且,团队在该平台上实现了基于多智能体强化学习算法的多机协同策略,完成了从仿真模拟到实体运作的技术迁移。相关技术在机器人协同服务领域具有广阔的应用前景。
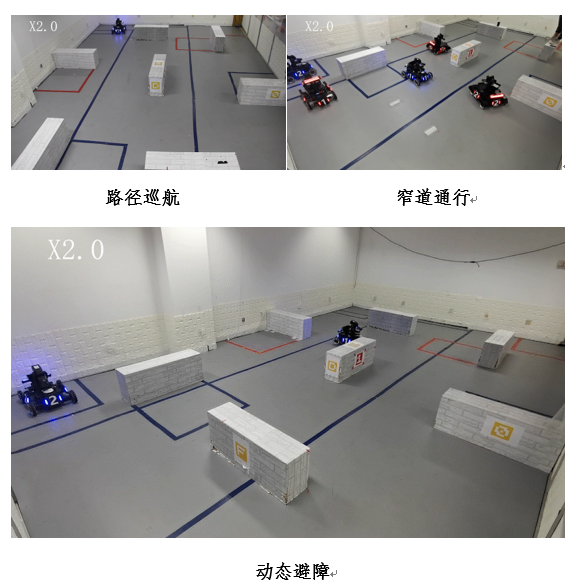
在导航与运动规划赛道,团队提出了全局路径规划模块,可根据上层决策指令和预建地图,快速搜索可行路径。相关方案结合传感器实时反馈数据,将全局可行路径解算成可行运动轨迹,高效实现了路径巡航、窄道通行与动态避障等功能。
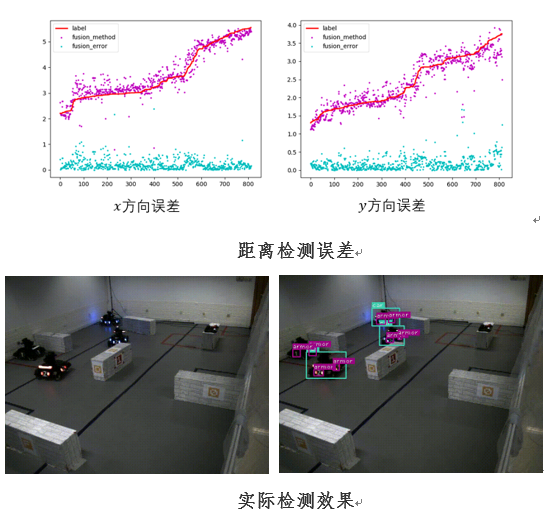
在感知赛道,团队根据机器人上搭载的激光雷达和工业相机等传感器,选择使用深度学习检测算法做模型预训练,通过使用神经网络架构搜索技术实现了快速目标检测;并采用多传感器融合实现高动态、大遮挡、变光照环境下的精确定位和高效准确的环境感知。
在决策赛道,团队的工作重点集中在决策层系统部署及仿真训练环境搭建上。针对典型的2v2自主对抗场景,团队结合多智能体深度强化学习和行为决策树两种方式设计决策处理器,将经过大量仿真环境交互优化后得到的网络模型应用于实车决策,优化了决策效率。

参赛队员合照
相关发布资源可参见:
RoboMaster 2020 人工智能挑战赛获奖名单公布:https://www.robomaster.com/zh-CN/resource/pages/announcement/1199
深度强化学习团队RoboMaster2020人工智能挑战赛相关开源资料及相关具体信息可参见:
规划:https://github.com/DRL-CASIA/RMAI2020-Planning
感知:https://github.com/DRL-CASIA/RMAI2020-Perception
决策:https://github.com/DRL-CASIA/RMAI2020-Decision