智能机器人系统研究团队提出机器人类人灵巧操作方法,实现人与机器人间的类人物体交接
类人灵巧操作能力是目前机器人亟待突破的瓶颈之一,许多对人类而言异常简单的灵巧操作任务,对机器人来讲是极其困难的。类人物体交接(Object Handover)是人类期望机器人能具有的关键类人灵巧操作能力之一,对于人和机器人的交互、协同与合作,以及机器人在服务、工业、航天等领域的广泛应用具有重要的意义。
自动化所王鹏研究员团队通过借鉴人与人之间的物体交接方式,提出了一种人与仿人五指灵巧手机器人之间的类人物体交接灵巧操作方法,并应用到实际机器人平台中,实现了人和仿人五指灵巧手机器人之间的多样性物体类人交接自主灵巧操作(Learning Human-to-Robot Dexterous Handovers for Anthropomorphic Hand)。
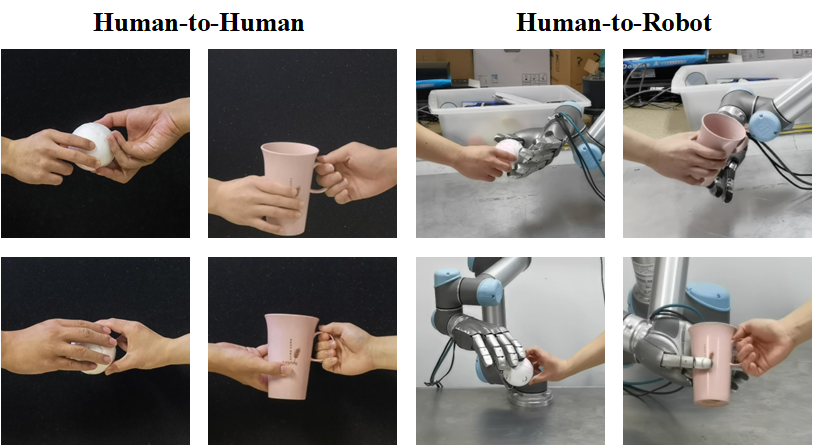
(左)人与人之间的物体交接,(右)人与机器人之间的类人物体交接
目前,人与机器人间的物体交接主要以二指平行爪等简单机构作为机器人的末端执行器,由于结构的差异性,难以实现物体在人和机器人之间的自然和灵巧传递。该研究以具有仿人结构和自由度的五指灵巧手作为机器人末端执行器,借鉴人手的抓握习惯建立学习模型,自动生成物体交接抓取配置策略,从而使机器人能够使用类人的抓握方式,实现对人传递物体的灵巧交接。
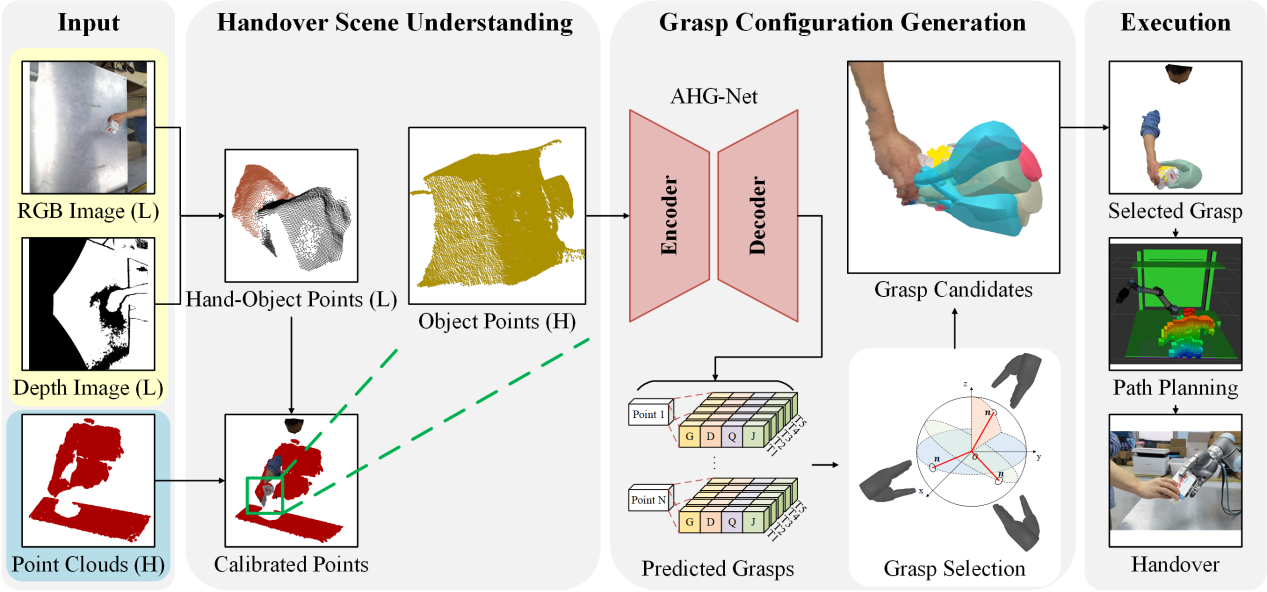
人与仿人五指灵巧手之间的类人物体灵巧交接方法
研究提出了基于仿人五指灵巧手的“人-机器人”类人物体交接框架。框架包括三个模块:(1)基于多模态感知的场景理解;(2)抓取配置学习与生成;(3)交接路径规划与机器人动作实施。 为使机器人能适应不同的交接物体,团队提出了一种仿人五指手高效抓取学习模型AHG-Net,模型以物体单视角点云作为输入并对抓取配置进行预测,同时,构建了超过5000个物体和百万级抓取标签的数据集。
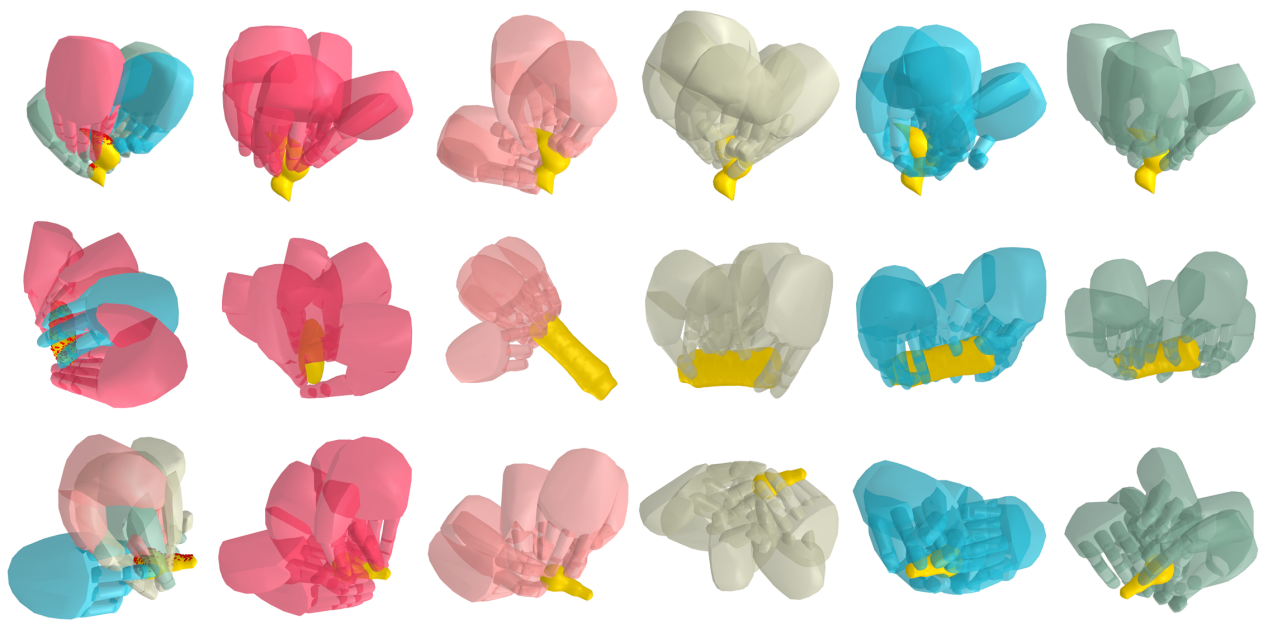

面向“人-机器人”物体交接抓取学习的数据集及虚拟环境下的验证
研究应用于团队构建的类人灵巧操作机器人平台,实现了机器人以类人的抓取模式对人所传递物体进行自主交接操作。面对多样性的物体、随意的传递姿态,该方法都展现了较好的适应能力。
成果可推广应用于人形机器人等灵巧操作机器人中,为家庭服务、空间在轨操作、工业人机协作、危险物处置等应用场景的“人-机器人”交互和协同操作提供支撑。

传递任意姿态物体

从不同方向传递物体

传递多样性物体
成果发表在《IEEE Transactions on Cognitive and Developmental Systems》上。
Haonan Duan, Peng Wang*, Yiming Li, Daheng Li, Wei Wei,Learning Human-to-Robot Dexterous Handovers for Anthropomorphic Hand, IEEE Transactions on Cognitive and Developmental Systems, 2022. DOI: 10.1109/TCDS.2022.3203025